Zivid SDK 2.0 solves fundamental challenges in 3D machine vision.

Zivid's enhanced vision engine algorithm effectively removes artifacts for the very first time.
OSLO, Norway, June 4th, 2020 – Zivid, the 3D machine vision camera company, has announced a major update of its software development kit. Introducing a range of ground-breaking industry firsts, Zivid SDK 2.0 beta includes filtering to correct contrast distortion artifacts, enhanced HDR image capture sequencing, and multi-camera calibration.
The new contrast distortion correction will enable developers to address a fundamental source of error in active 3D measurement technology, including structured light systems. Signal blur at high-contrast transitions, notably on metal surfaces with strong highlights, cause artifacts and heavily distorted or deformed 3D point clouds. Zivid's enhanced vision engine algorithm effectively removes the problem for the very first time.
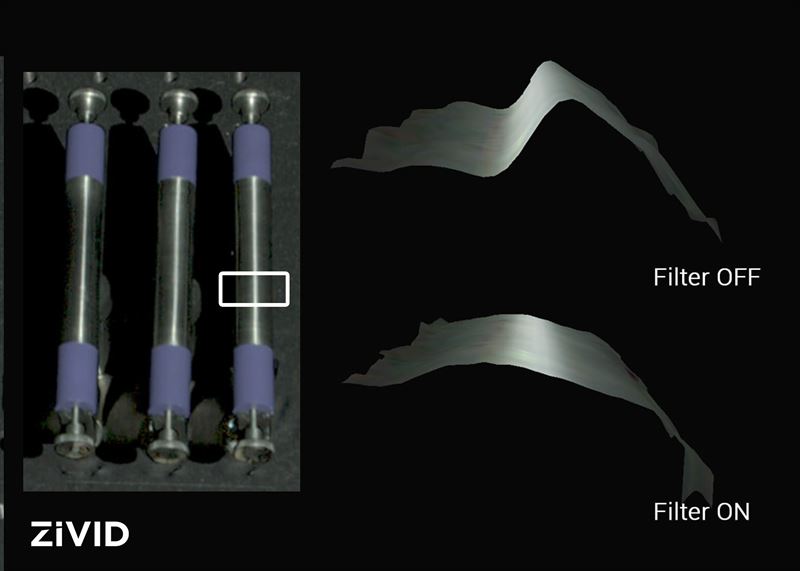
Ruben Smits, Co-founder and VP of Engineering at Pickit, an experienced user of Zivid One+ 3D cameras and a trailblazer in vision-guided robot solutions, said, "Abrupt black to white transitions and regions of specular reflections, like those on a shiny metal cylinder for example, have always induced errors in-depth decoding, causing distorted surface images. Zivid's distortion correction filtering rectifies such aberrations, ensuring a truer, more accurate 3D image. We are excited to see that previously impossible machine vision applications are now made possible."
Updates to the software development kit's core API settings also mean more intuitive and flexible HDR image capture sequencing. Both single and multi-acquisition HDR images can be accessed, with developers now having the option to output the specific image data they need for an application; three dimensions (XYZ), homogenous coordinates (XYZW), color (RGBA), point data (XYZRGBA), Signal-to-Noise Ratio (SNR) value.
Importantly, by optimizing GPU to CPU image data transactions, the SDK will also help streamline and accelerate 3D image data handling. This is of particular benefit in high speed, cycle time-critical applications.
For robot cells requiring a 360º view of a target object, Zivid's new software development kit also supports full-picture, multi-camera calibration. Reducing the need for object rotation, the new software enables all static and robot-mounted cameras to be set-up using a common calibration pattern and operated according to a unified coordinate system.
Availability
For use with all Zivid One+ 3D color cameras and Windows and Linux, the Zivid SDK 2.0 beta is available today as a free download. The production release will be made available at the end of June.
About Zivid
Zivid is a market-leading provider of 3D machine vision cameras and software for next-generation collaborative robot (cobot) cells, autonomous industrial robot cells, and other industrial automation systems.
Its Zivid One Plus products are regarded as the world's most accurate real-time 3D color cameras and bring human-like vision to the smart factories and warehouses of Industry 4.0.
With more than two decades of in-house R&D and in-depth expertise in optical sensors, 3D machine vision hardware and software, Zivid enables customers to boost efficiency and productivity in a range of applications, including random bin picking, pick and place, de-palletizing, assembly, packaging and quality inspection.
The Zivid One 3D color camera has received numerous awards for its technical features, quality of data (QoD), and design implementation. Awards include "Top Innovation Award" by inVISION Magazine, "Gold Innovators Award" by Vision Systems Design, Red Dot's "Product Design" award, and the Research Council of Norway's prestigious "Innovation Award."
To discover how Zivid is shaping the future of 3D machine vision visit www.zivid.com.

